Robot
Design --20-265-638-001
Spring
Quarter 2000, Room 748 Baldwin
Tuesday
5:00--7:40 PM
Instructor:
Professor Ernest L. Hall, Room 659 Baldwin
Phone: 556-2730, FAX: 556-4116, Email:
elhall@uceng.uc.edu, Pager: 249-3197
Office
Hours: Tuesday & Thursday, 1:00-2:00 PM
Textbook: L. Sciavicco and B. Siciliano, Modeling and
Control of Robot Manipulators,
Course notes are also used. Computer Usage:
Programming with MATLAB and SIMULINK and a symbolic processor such as Mathcad
or Mathematica.
Laboratory Project: A class design project is conducted individually
for an industrial robot or AGV. This project requires about 10% of the
student's time for the course. A written technical report and presentation are
required of the analytical robot design.
Grading System: Quiz 1 OPEN
BOOK 25%
Quiz 2 CLOSED
BOOK 25%
Project Written
Report 15%
Project Presentation Oral Report 10%
Homework 25%
Topics. The analysis and design of an industrial robot is studied starting
from payload and repeatability specifications and ending with the design. Robot
design tools are used for manipulator kinematics and dynamics and control
stability.
Lecture Date Description
1. 3/28/2000 Robot
System Design, Ch.1
Spatial
descriptions, Ch. 2
2. 4/
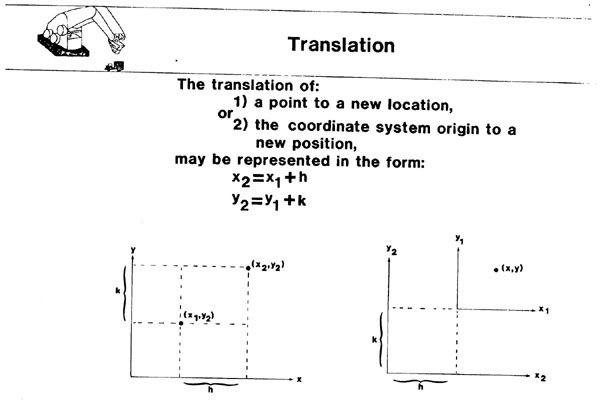
4/2000 Transformation
Matrices D-H Convention
3. 4/
11/2000 Industrial
Robot Examples
Kinematics
of AGV
4. 4/18/2000 AGV
Examples, Mathcad
Clarification on Homework due next week.
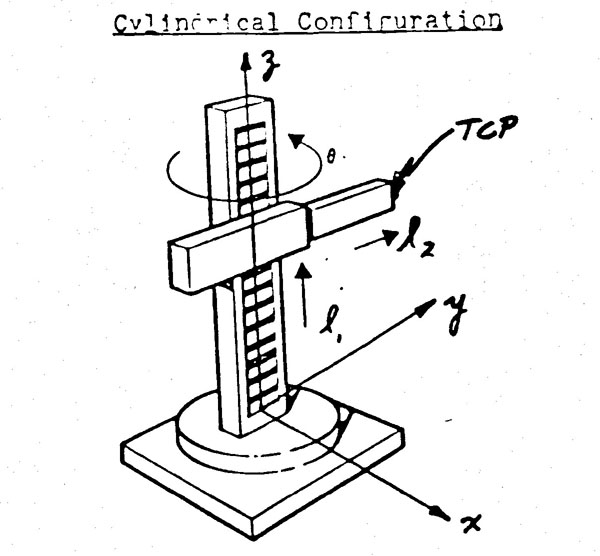
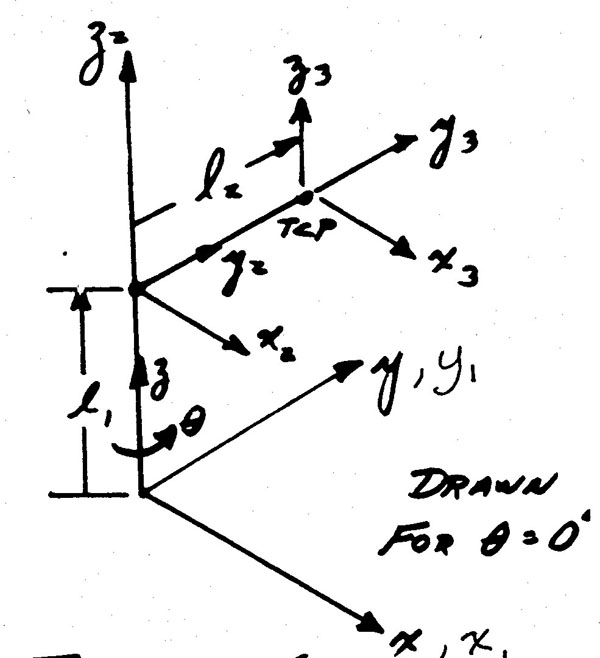
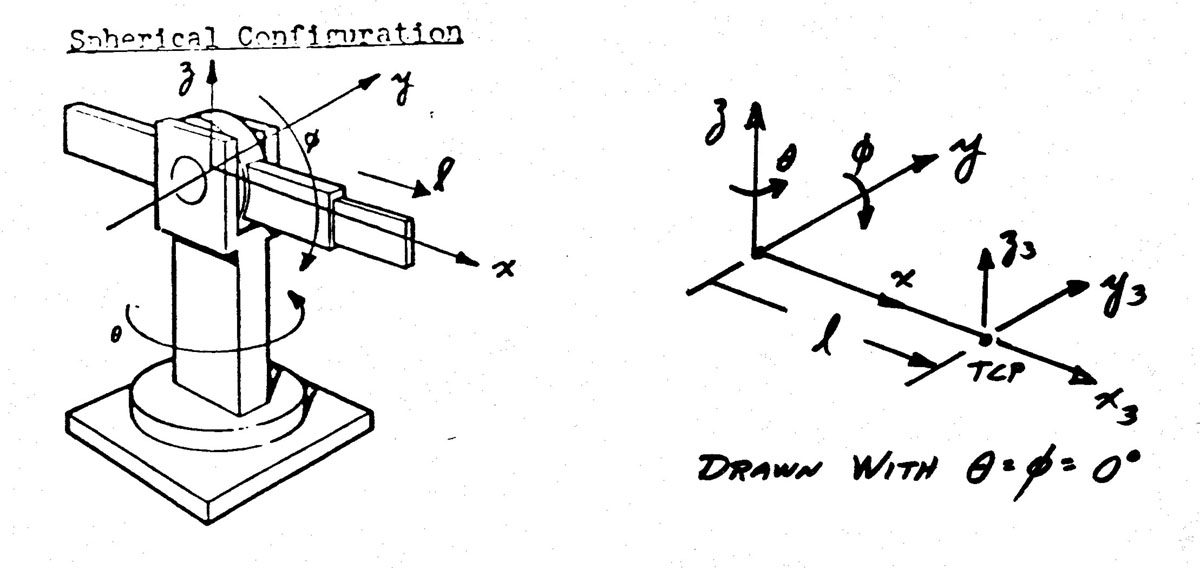
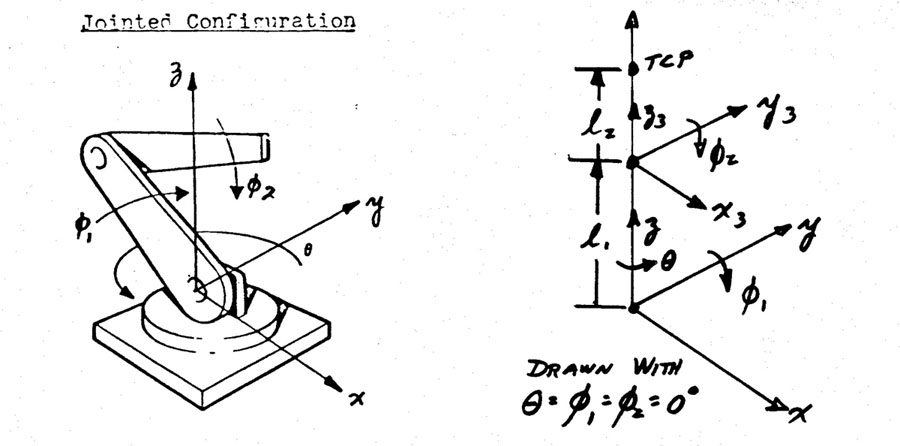
Three robots, cylindrical, spherical, jointed.
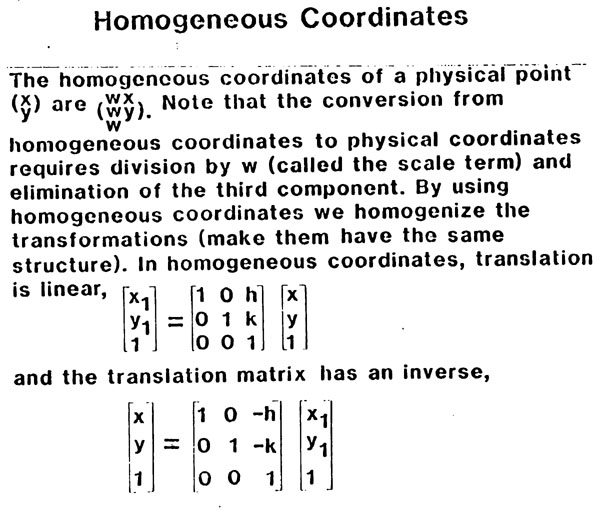
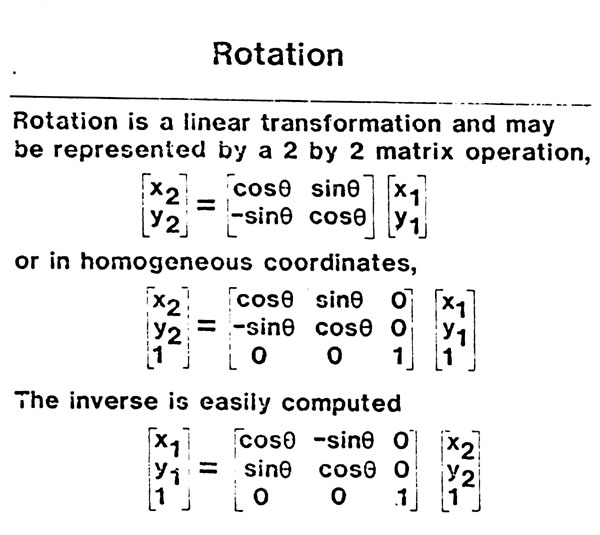
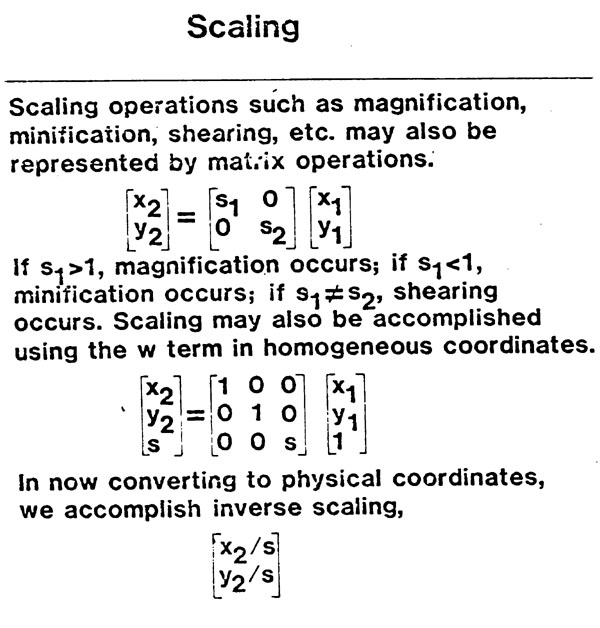
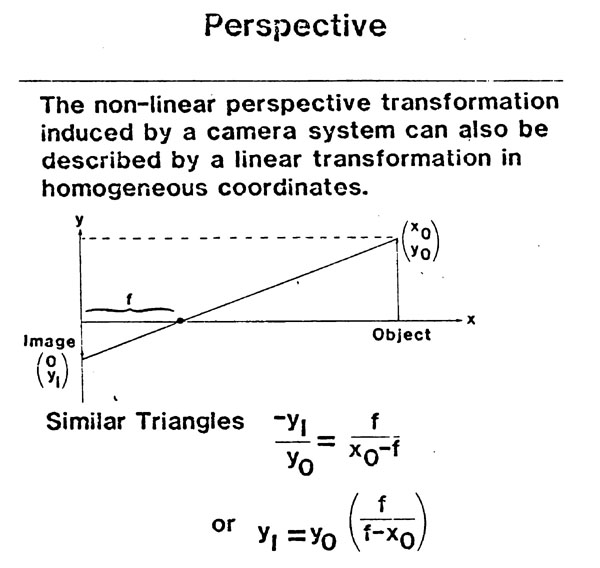
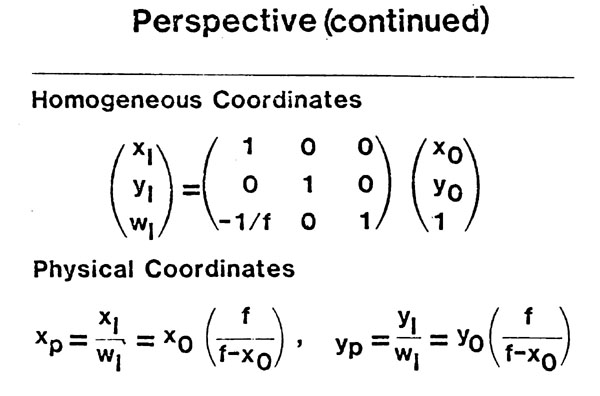
Forward kinematics, done in homogeneous
coordinates by hand and with Mathcad.
Inverse kinematics done by hand and with
Mathcad as extra credit.
Redundancies,
Ch.3
5. 4/25/2000 Dynamics,
Ch. 4, Quiz 1
Dynamic
Models
6. 5/2/2000 Inverse
Dynamics
Trajectory
Planning, Ch. 5
7. 5/9/2000 Operational
Space, Quiz 2
Motion
Control
8. 5/16/2000 Stability
Bode
Analysis
9. 5/23/2000 Examples
Force
Control, Ch.7
10. 5/30/2000 Remote
Manipulators
Applications
FINAL Thursday
6/8/2000, 12:00-2:00 pm or TBA Report
Presentations
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}